Transistorid: ahel, tööpõhimõte, kuidas erinevad bipolaarne ja väljaefekt. Seadmete ühendamise omadused Arduino bipolaarse transistori arduinoga
Võimsat koormust, näiteks valgustuslampi või elektripumpa, ei ole võimalik otse Arduinoga ühendada. Mikrokontroller ei anna sellise koormuse käitamiseks vajalikku võimsust. Arduino väljundite kaudu voolav vool ei ületa 10-15 mA. Appi tuleb relee, millega saab suuri voolusid ümber lülitada. Lisaks, kui koormust toidab vahelduvvool, näiteks 220v, siis ilma releeta ei saa kuidagi hakkama. Võimsate koormuste ühendamiseks Arduinoga releede kaudu kasutatakse tavaliselt releemooduleid.
Sõltuvalt lülitatavate koormuste arvust kasutatakse ühe-, kahe-, kolme-, nelja- ja enamakanalilisi releemooduleid.
Ostsin enda, ühe ja nelja kanaliga moodulid Aliexpressist vastavalt 0,5 ja 2,09 dollari eest.
Releemooduli disain Arduino jaoks, kasutades 4-kanalilise mooduli HL-54S V1.0 näidet.

Vaatame lähemalt selle mooduli disaini, tavaliselt on kõik mitme kanaliga moodulid ehitatud selle skeemi järgi.

Mooduli skemaatiline diagramm.
Arduino tihvtide kaitsmiseks relee mähises pinge tõusude eest kasutatakse J3Y transistorit ja optroni 817C. Pange tähele, et signaal kontaktilt sisse toidetakse optroni katoodile. See tähendab, et selleks, et relee kontaktid sulgeks, peate tihvti külge rakendamasisse loogiline 0 (ümberpööratud signaal).

Samuti on mooduleid, millel on signaal kontaktilt sisse tarnitakse optroni anoodile. Sel juhul peate esitama loogiline 1 tihvti kohtasisse, relee aktiveerimiseks.
Koormusvõimsust, mida moodulid saavad sisse/välja lülitada, piiravad plaadile paigaldatud releed.

Sel juhul kasutatakse elektromehaanilisi releed Laul SRD-05VDC-SL-C, millel on järgmised omadused:
Tööpinge: 5 V
Mähise töövool: 71 mA
Maksimaalne lülitusvool: 10A
Maksimaalne alalisvoolu lülituspinge: 28 V
Maksimaalne vahelduvvoolu lülituspinge: 250 V
Töötemperatuur:-25 kuni +70°C

Songle SRD-05VDC-SL-C releel on 5 kontakti. 1 Ja 2 relee toiteallikas. Kontaktgrupp 3 Ja 4 on tavaliselt avatud kontaktid ( EI), kontaktgrupp 3 Ja 5 - tavaliselt suletud ( NC).
Sarnased releed on erineva pingega: 3, 5, 6, 9, 12, 24, 48 V. Sel juhul kasutatakse 5-voldist versiooni, mis võimaldab releemooduli toidet otse Arduinost.
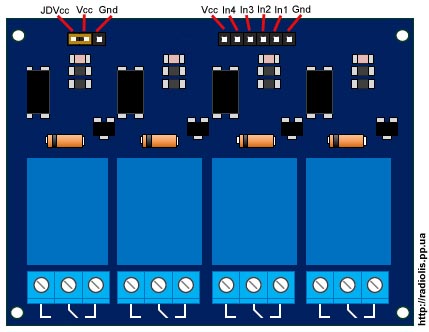
Laual on hüppaja ( JDVcc), et toita releed kas Arduinost või eraldi toiteallikast.
Pinami In1,In2,In3,In4 Moodul on ühendatud Arduino digitaalsete kontaktidega.
HL-54S V1.0 mooduli relee ühendamine Arduinoga.
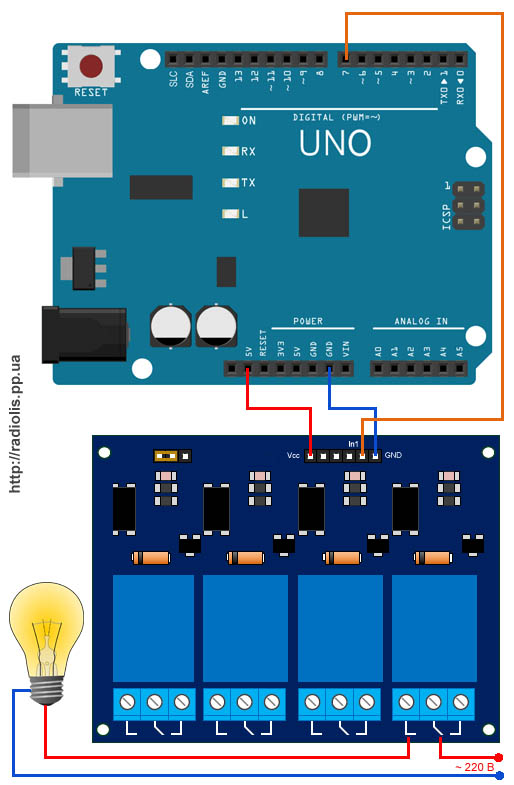
Kuna meil on 5-voldiste releetega moodul, siis ühendame selle selle skeemi järgi, võttes voolu Arduino endalt. Näites ühendan ühe relee, kasutan koormusena 220 V pirni.
Mooduli relee toiteks Arduinost peab hüppaja lühistama " Vcc"Ja" JDVcc", on see tavaliselt vaikimisi sinna installitud.
Kui teie relee pole 5 volti, ei saa te moodulit Arduinost toita, tuleb toide võtta eraldi allikast.
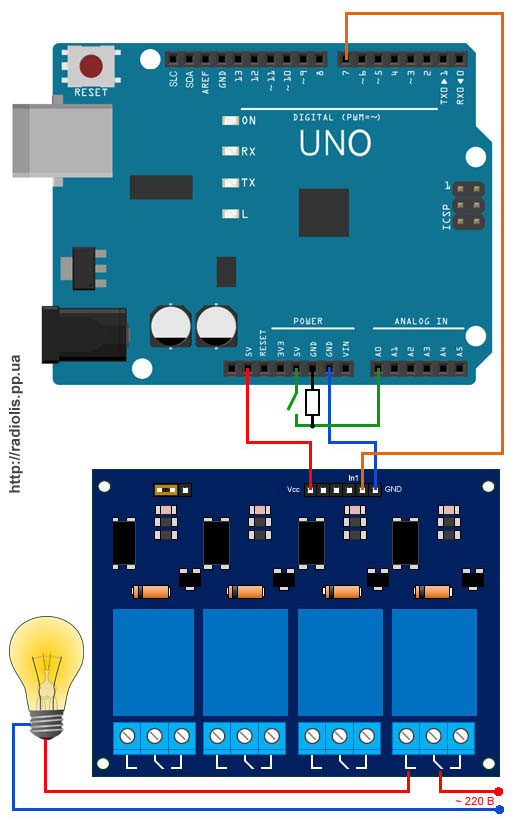
Allolev diagramm näitab, kuidas ühendada mooduli toide eraldi allikast. Seda vooluringi kasutades peate ühendama relee, mis on ette nähtud toiteallikaks rohkem või vähem kui 5 V. 5-voldiste releede puhul on see vooluahel samuti eelistatavam.

Selle ühendusega peate eemaldama tihvtide vahelise hüppaja " Vcc"Ja" JDVcc" Järgmine pin " JDVcc" ühenda " + » väline toiteallikas, pin « Gnd" ühenda " - " toiteallikas. Kinnita " Gnd", mis eelmises vooluringis oli ühendatud " Gnd"Arduino pole selles vooluringis ühendatud. Minu näites on väline toiteallikas 5 V, kui teie relee on mõeldud erineva pinge jaoks (3, 12, 24 V), valige sobiv väline toiteallikas.
Sketš releemooduli juhtimiseks Arduino kaudu.
Laadime Arduinosse üles visandi, mis lülitab lambipirni (vilkuv tuli) sisse ja välja.
| int relayPin = 7; void setup() ( void loop() ( |
Järjekorras int relayPin = 7; märkige selle Arduino digitaalse viigu number, millega viik oli ühendatud In1
mooduli relee. Saate ühendada mis tahes digitaalse tihvtiga ja märkida selle sellel real.
Järjekorras viivitus(5000); Saate muuta ajaväärtust, millal tuli süttib ja kustub.
Järjekorras digitalWrite(relayPin, LOW); näidatakse loogilise nulli rakendamisel ( MADAL), sulgeb releemoodul kontaktid ja tuli süttib.
Järjekorras digitalWrite(releePin, HIGH); märgitud loogilise ühiku esitamisel ( KÕRGE), avab releemoodul kontaktid ja tuli kustub.
Nagu näeme, rivis digitalWrite(relayPin, LOW); jättis parameetri MADAL. Kui relee sulgeb oma kontaktid ja tuli süttib, tähendab see tihvti In1 peate sisestama loogilise nulli, nagu minu oma. Kui tuli ei sütti, laadige üles visand, milles parameetri asendame MADAL peal KÕRGE.
Sketši tulemus videol.
Nüüd lisame vooluringile taktinupu ja sellele vajutades lülitab releemoodul lambipirni sisse.

Ühendame nupu kokku 10k tõmbetakistiga, mis ei lase välistel häiretel ahela tööd mõjutada.
Visandi üleslaadimine
Järjekorras if(digitalRead(14)==HIGH) määrake digitaalse viigu number, millega nupp on ühendatud. Saate ühenduse luua mis tahes tasuta seadmega. Näites on see analoogtihvtA0, seda saab kasutada ka digitaalse 14 kontaktiga.
Järjekorras viivitus(300); väärtus määratakse millisekundites. See väärtus näitab, kui kaua pärast nupu vajutamist või vabastamist tuleb toiminguid teha. See on kaitse kontakti põrkumise eest.
Infoks! Kõik analoogsisendidalates A0 ( nummerdatud kui 14) kuni A5 (19), saab kasutada digitaalsena ( digitaalne PWM).
Kokkuvõtteks võib öelda, et visandi tulemus on näidatud videol.
Odavamad releemoodulid ei pruugi oma vooluringis optronit sisaldada, nagu näiteks minu puhul ühe kanaliga mooduli puhul.

Ühe kanaliga releemooduli skeem. Tootja hoidis optroni pealt kokku, mistõttu kaotas Arduino plaat galvaaniisolatsiooni. Sellise tahvli kasutamiseks tihvti peal sisse peate sisestama loogilise nulli.
Mooduli relee ühendamine Arduino Due'ga.
Arduino Due töötab 3,3 voltiga, mis on maksimaalne pinge, mis sellel sisenditel/väljunditel võib olla. Kõrgema pinge korral võib plaat läbi põleda.
Tekib küsimus, kuidas moodulit releega ühendada?

Eemaldage JDVcc hüppaja. Ühendage tihvt " Vcc» mooduli releeplaadil tihvti külge "3,3 V» Arduino. Kui relee on ette nähtud 5 volti jaoks, ühendage kontakt " GND» mooduli releeplaadid, kontaktiga « GND» Arduino Due. Kinnita " JDVcc"ühenda PIN-koodiga" 5V"Arduino Due tahvlil. Kui relee on ette nähtud erineva pinge jaoks, siis ühendame toite releega nagu joonisel, näites on see 5 volti. Kui teil on mitme kanaliga releemoodul, kontrollige seda « JDVcc"ühendatud kõigi releede ühele küljele. Optronid aktiveeritakse 3,3 V signaaliga, mis omakorda aktiveerib transistori, mida kasutatakse relee sisselülitamiseks.
Triacist valmistatud pooljuhtrelee võimsa koormuse lülitamiseks Arduino kaudu
Vaatasime LED-ide juhtimiseks töötamist fototakistiga. Tihti on aga vaja juhtida võimsamat koormust, nagu hõõglamp, elektrimootor, elektromagnet vms. Arduino väljundid ei suuda nii võimsat koormust ja kõrget pinget toita. Näiteks robootikas kasutatakse sageli 12V, 24V, 36V jne mootoreid. Lisaks on Arduino viigu väljundvool tavaliselt piiratud 40 mA-ga.
Üks võimalus võimsa koormuse juhtimiseks on MOSFET-transistoride kasutamine. See võimaldab ühendada üsna võimsa koormuse, mille toitepinge on 40-50 volti või rohkem ja mitme ampriga voolud, näiteks elektrimootorid, elektromagnetid, halogeenlambid jne.
Ühendusskeem on üsna lihtne, nagu näete.
Kui koormus on induktiivne (elektrimootor, solenoidklapp jne), siis on soovitatav paigaldada kaitsediood, mis kaitseb mosfeti iseinduktsiooni pinge eest. Kui juhite elektrimootorit PWM-iga ilma kaitsedioodita, võib tekkida probleeme, näiteks mosfet kuumeneb või lendab välja, teie mootor hakkab aeglaselt pöörlema, tekib võimsuse kadu jne. Seega paigaldage induktiivsete koormuste jaoks alati kaitsediood. Enamasti ei kaitse mosfeti sisse ehitatud kaitsediood induktiivsete emissioonide eest!
Kui teie koormus on aktiivne - LED, halogeenlamp, kütteelement jne, siis sel juhul pole dioodi vaja.
Paisuahelasse on soovitav paigaldada allatõmbetakisti (tõmbetakisti värava ja allika vahele). Arduino kõrgetasemelise signaali puudumisel on vaja tagada, et mosfeti värav säilitaks madala taseme. See takistab transistori spontaanset sisselülitamist.
Mosfeti valimisel, nii et see avaneks otse mikrokontrollerist ja ei pea selle ette asetama bipolaarseid transistore ja draivereid, pöörake tähelepanu Gate Threshold parameetrile, mis peaks olema ligikaudu 1 kuni 4 volti. Sageli on sellised transistorid märgistatud kuiLoogika tase.
Võtame näiteks transistori: IRL3705N N-kanaliga Hexfet Power MOSFET.
See transistor on võimeline taluma pidevat voolu kuni 89A (loomulikult koos jahutusradiaatoriga) ja avaneb paisupingel 1V (parameeter V GS(th)). Seetõttu saame selle transistori otse Arduino jalgadega ühendada. Kui transistor on täielikult avatud, on allika äravoolu takistus ainult 0,01 oomi (parameeter R DS(sees)). Seega, kui ühendate sellega 12 V, 10 A elektrimootori, on transistori pingelangus vaid 0,1 V ja võimsuse hajumine on 1 vatt.
Kui kasutame kontrolleri PWM väljundit, saame juhtida mootori võimsust (ja seega ka pöörlemiskiirust).
Järgmised artiklid hõlmavad seadmeid, mis peavad juhtima väliseid koormusi. Välise koormuse all pean silmas kõike, mis on mikrokontrolleri jalgade küljes - LEDid, lambipirnid, releed, mootorid, täiturmehhanismid... no saate aru. Ja ükskõik kui hakitud see teema ka poleks, riskin järgmistes artiklites korduste vältimiseks siiski mitte olla originaalne - annate mulle andeks :). Näitan lühidalt soovituslikus vormis levinumaid viise koormuse ühendamiseks (kui soovite midagi lisada, on mul väga hea meel).
Leppigem kohe kokku, et jutt käib digitaalsest signaalist (mikrokontroller on ikkagi digitaalne seade) ja me ei kaldu kõrvale üldisest loogikast: 1
- kaasas, 0
-välja lülitatud. Alustagem.
Alalisvoolukoormuste hulka kuuluvad: LED-id, lambid, releed, alalisvoolumootorid, servod, erinevad täiturmehhanismid jne. Selline koormus on kõige lihtsamalt (ja kõige sagedamini) ühendatud mikrokontrolleriga.
1.1 Ühendus koormused takisti kaudu.
Lihtsaim ja tõenäoliselt kõige sagedamini kasutatav meetod LED-ide puhul.

Takisti on vajalik selleks, et piirata mikrokontrolleri jalga läbivat voolu lubatud piirini 20mA. Seda nimetatakse ballastiks või summutamiseks. Takisti väärtuse saate ligikaudselt arvutada, teades koormustakistust Rн.
Karastamine =(5v / 0,02A) – Rн = 250 – Rн
Nagu näete, piisab isegi halvimal juhul, kui koormustakistus on null, 250 oomi, et vool ei ületaks 20 mA. See tähendab, et kui te ei taha midagi sinna lugeda, pange 300 oomi ja kaitsete sadamat ülekoormuse eest. Meetodi eelis on ilmne - lihtsus.
1.2 Ühendus koormused kasutades bipolaarset transistori.
Kui juhtub nii, et teie koormus tarbib üle 20mA, siis takistist siin muidugi abi ei ole. Peate voolu kuidagi suurendama (loe tugevdama). Mida kasutatakse signaali võimendamiseks? Õige. Transistor!
![]()
Seda on mugavam kasutada tugevdamiseks n-p-n vooluringi järgi ühendatud transistor OE. Selle meetodi abil saate ühendada mikrokontrolleriga koormuse, mille toitepinge on suurem kui toiteallikas. Aluse takisti on piirav. See võib varieeruda laias vahemikus (1-10 kOhm), igal juhul töötab transistor küllastusrežiimis. Transistor võib olla ükskõik milline n-p-n transistor. Kasum on praktiliselt ebaoluline. Transistor valitakse kollektori voolu (meil vajamineva voolu) ja kollektor-emitteri pinge (pinge, mis toidab koormust) alusel. Samuti on oluline võimsuse hajumine - et mitte üle kuumeneda.
Levinud ja kergesti ligipääsetavatest saab kasutada BC546, BC547, BC548, BC549 mis tahes tähtedega (100mA) ja sobib isegi sama KT315 (kellel on vanadest varudest ülejääke).
- Bipolaarse transistori BC547 andmeleht
1.3 Ühendus koormused väljatransistori kasutamine.
Mis siis, kui meie koormuse vool on kümne ampri piires? Bipolaarset transistori pole võimalik kasutada, kuna sellise transistori juhtimisvoolud on suured ja ületavad tõenäoliselt 20 mA. Väljund võib olla kas komposiittransistor (loe allpool) või väljatransistor (teise nimega MOS, aka MOSFET). Väljatransistor on lihtsalt suurepärane asi, kuna seda ei juhi mitte vool, vaid väravas olev potentsiaal. See võimaldab mikroskoopilisel paisuvoolul juhtida suuri koormusvoolusid.
Meile sobib igasugune n-kanaliga väljatransistor. Valime, nagu bipolaarne, voolu, pinge ja võimsuse hajumise järgi.

Väljatransistori sisselülitamisel peate arvestama mitme punktiga:
- kuna värav on tegelikult kondensaator, siis kui transistor lülitub, siis voolavad sellest läbi suured voolud (lühiajalised). Nende voolude piiramiseks asetatakse väravasse piirav takisti.
— transistori juhitakse madalate vooludega ja kui paisuga ühendatud mikrokontrolleri väljund on suure takistusega Z-olekus, hakkab väljalüliti ettearvamatult avanema ja sulguma, püüdes häireid kinni. Selle käitumise kõrvaldamiseks tuleb mikrokontrolleri jalg umbes 10 kOhm takistiga maapinnale suruda.
Väljatransistoril on kõigi selle positiivsete omaduste taustal puudus. Madala voolu juhtimise hind on transistori aeglus. Loomulikult saab see PWM-iga hakkama, kuid lubatud sageduse ületamisel reageerib see teile ülekuumenemisega.
1.4 Ühendus koormused kasutades kombineeritud Darlingtoni transistori.
Alternatiiviks väljatransistori kasutamisele suure vooluga koormuste korral on Darlingtoni komposiittransistori kasutamine. Väliselt on see sama transistor nagu näiteks bipolaarne, kuid sisemiselt kasutatakse võimsa väljundtransistori juhtimiseks eelvõimendi ahelat. See võimaldab madalatel vooludel juhtida võimsat koormust. Darlingtoni transistori kasutamine pole nii huvitav kui selliste transistoride komplekti kasutamine. Seal on selline imeline mikroskeem nagu ULN2003. See sisaldab koguni 7 Darlingtoni transistorit, millest igaüks on koormatav kuni 500 mA vooluga ning neid saab voolu suurendamiseks paralleelselt ühendada.

Mikrolülitust on väga lihtne mikrokontrolleriga ühendada (lihtsalt pin to pin), sellel on mugav juhtmestik (sisend vastupidine väljund) ja ei vaja lisajuhtmeid. Selle eduka disaini tulemusena kasutatakse ULN2003 laialdaselt amatöörraadio praktikas. Sellest tulenevalt pole selle hankimine keeruline.
- Darlingtoni montaaži ULN2003 andmeleht
Kui teil on vaja juhtida vahelduvvoolu seadmeid (enamasti 220 V), siis on kõik keerulisem, kuid mitte palju.
2.1 Ühendus koormused kasutades releed.
Lihtsaim ja tõenäoliselt kõige usaldusväärsem ühendus on relee kasutamine. Relee mähis ise on suure vooluga koormus, nii et te ei saa seda otse mikrokontrolleriga ühendada. Relee saab ühendada välja- või bipolaarse transistori kaudu või sama ULN2003 kaudu, kui on vaja mitut kanalit.

Selle meetodi eelisteks on suur lülitusvool (olenevalt valitud releest), galvaaniline isolatsioon. Puudused: piiratud kiirus/aktiveerimise sagedus ja osade mehaaniline kulumine.
Pole mõtet midagi kasutamiseks soovitada - releed on palju, valige vastavalt vajalikele parameetritele ja hinnale.
2.2 Ühendus koormused kasutades triaki (triac).
Kui teil on vaja juhtida võimsat vahelduvvoolu koormust ja eriti kui teil on vaja juhtida koormusele tarnitavat võimsust (dimeerid), ei saa te lihtsalt ilma triaki (või triaki) kasutamata. Triac avatakse lühikese vooluimpulsiga läbi juhtelektroodi (nii negatiivse kui positiivse pinge poollainete jaoks). Triac sulgub ise, kui sellel pole pinget (kui pinge läheb läbi nulli). Siit saavad alguse raskused. Mikrokontroller peab juhtima hetke, mil pinge ületab nulli ja täpselt määratletud hetkel saatma impulsi triaki avamiseks – see on kontrolleri pidev hõivatus. Teine raskus on triaki galvaanilise isolatsiooni puudumine. Peate seda tegema eraldi elementidel, muutes vooluringi keerulisemaks.

Kuigi tänapäevaseid triakke juhitakse üsna väikese vooluga ja neid saab otse (piirava takisti kaudu) ühendada mikrokontrolleriga, tuleb need ohutuse huvides sisse lülitada läbi optiliste lahtisidestusseadmete. Pealegi ei kehti see mitte ainult triac-juhtahelate, vaid ka nulljuhtimisahelate kohta. 
Üsna mitmetähenduslik viis koormuse ühendamiseks. Kuna ühest küljest nõuab see mikrokontrolleri aktiivset osalemist ja suhteliselt keerulist vooluahela ülesehitust. Teisest küljest võimaldab see koormaga väga paindlikult manipuleerida. Triacide kasutamise puuduseks on ka nende töö käigus tekkiv suur hulk digitaalset müra – vaja on summutusahelaid.
Triakke kasutatakse üsna laialdaselt ja mõnes piirkonnas on need lihtsalt asendamatud, nii et nende hankimine pole probleem. BT138 tüüpi triakke kasutatakse amatöörraadios väga sageli.
Mõnikord tuleb aeg, mil kasutaja soovib võimsat seadet juhtida, kasutades . Me kõik teame, et Arduino suudab igal oma väljundil väljastada 20 mA (maksimaalselt 40 mA). Olgu, aga mida teha, kui tahame juhtida näiteks alalisvoolumootorit.
Sel juhul saame kasutada näiteks bipolaarset transistori, kui vool pole liiga suur, L293D silda või MOSFET transistori.
Mis on MOSFET?
Oma projektis kasutame STP16NF06L MOSFET transistorit, millel on N-tüüpi kanal.
MOSFET on väljatransistor, millel on 3 jalga: allikas (S), värav (G) ja äravool (D). Vool liigub allika ja äravoolu vahel, läbi nn kanali. Voolutugevus sõltub paisule - allikale rakendatavast juhtpingest.
MOSFET-transistorid on kiiremad kui bipolaarsed transistorid, kuna neis toimuvad protsessid on puhtalt elektrostaatilised. Peamine lülitusaega mõjutav tegur on paisu mahtuvuse olemasolu.
MOSFETi ühendamine Arduinoga
MOSFET-transistori värav (G) peab olema ühendatud Arduinoga. Üldiselt võime öelda, et allikas (S) peaks olema ühendatud meie vooluringi miinusega ja äravool (D) peaks olema ühendatud meie juhitava objekti (näiteks lambipirni) miinusega. , mootor). Lisaks sellele tasub värava (G) ja allika (S) vahele ühendada takisti. See annab meile kindlustunde, et värav on madal, kui Arduinolt pole juhtsignaali.
Veelgi enam, kaabli rikke korral oleme kindlad, et väravas ei ole määratlemata olekut, mis võiks põhjustada juhitava objekti sisse- ja väljalülitumist.
Meie puhul kasutame juhtimiseks alalisvoolumootorit. Meie vooluring on mõeldud mootori pöörlemissageduse suurendamiseks ja vähendamiseks.
Ühendame kõik, nagu allpool näidatud. Lisaks saate ühendada välise toiteallika, unustamata ka toiteallika ja Arduino omavahelist ühendamist.

Transistor on tänapäevases mikroelektroonikas üldlevinud ja oluline komponent. Selle eesmärk on lihtne: see võimaldab nõrga signaali abil juhtida palju tugevamat.
Eelkõige saab seda kasutada juhitava "siibrina": "väravas" signaali puudumisel blokeerige voolu vool ja seda varustades lubage see. Teisisõnu: see on nupp, mida ei vajutata sõrmega, vaid pinget rakendades. See on digitaalelektroonikas kõige levinum rakendus.
Transistorid on saadaval erinevates pakendites: sama transistor võib välimuselt täiesti erinev välja näha. Prototüüpimisel on kõige levinumad juhtumid:
TO-92 - kompaktne, kergete koormate jaoks
TO-220AB - massiivne, hea soojuseraldusvõimega, suurte koormuste jaoks
Skeemidel olev tähistus varieerub ka sõltuvalt transistori tüübist ja koostamisel kasutatud tähistusstandardist. Kuid olenemata variatsioonist jääb selle sümbol äratuntavaks.
Bipolaarsed transistorid
Bipolaarsete transistoride (BJT, Bipolar Junction Transistor) kontaktid on kolm:
Kollektor - sellele rakendatakse kõrgepinge, mida soovite juhtida
Alus - selle kaudu tarnitakse väike kogus praegune avada suur; alus on selle blokeerimiseks maandatud
Emitter - vool voolab seda läbi kollektorist ja alusest, kui transistor on "avatud"
![]()
Bipolaarse transistori peamine omadus on indikaator h fe tuntud ka kui kasum. See näitab, mitu korda rohkem voolu kollektor-emitteri sektsioonis suudab transistor baas-emitteri voolu suhtes läbida.
Näiteks kui h fe= 100 ja 0,1 mA läbib baasi, siis transistor läbib ennast maksimaalselt 10 mA. Kui sel juhul on kõrge voolu sektsioonis komponent, mis tarbib näiteks 8 mA, antakse sellele 8 mA ja transistoril on "reserv". Kui mõni komponent tarbib 20 mA, antakse sellele ainult maksimaalselt 10 mA.
Samuti on iga transistori dokumentatsioonis näidatud kontaktidel maksimaalsed lubatud pinged ja voolud. Nende väärtuste ületamine põhjustab liigset kuumenemist ja kasutusea lühenemist ning tugev ületamine võib põhjustada hävimise.
NPN ja PNP
![]()
Eespool kirjeldatud transistor on nn NPN-transistor. Seda nimetatakse nii, kuna see koosneb kolmest räni kihist, mis on ühendatud järjestuses: negatiivne-positiivne-negatiivne. Kui negatiivne on negatiivsete laengukandjate liiaga ränisulam (n-leegitud) ja positiivne on positiivsete laengukandjate liiaga sulam (p-leegitud).
NPN-id on tööstuses tõhusamad ja tavalisemad.
PNP-transistoride määramisel erinevad need noole suunas. Nool osutab alati punktist P kuni N. PNP-transistorid on "ümberpööratud" käitumisega: voolu ei blokeerita, kui alus on maandatud, ja blokeeritud, kui vool seda läbib.
Väljatransistorid
Väljatransistoridel (FET, Field Effect Transistor) on sama eesmärk, kuid need erinevad sisemise struktuuri poolest. Nende komponentide teatud tüüpi on MOSFET (Metal-Oxide-Semiconductor Field Effect Transistor) transistorid. Need võimaldavad teil samade mõõtmetega töötada palju suurema võimsusega. Ja "siibri" enda juhtimine toimub eranditult kasutades pinget: erinevalt bipolaarsetest transistoridest ei voola läbi paisu vool.
Väljatransistoridel on kolm kontakti:
Äravool - sellele rakendatakse kõrgepinge, mida soovite juhtida
Värav - sellele rakendatakse pinget, mis võimaldab voolu voolata; värav on voolu blokeerimiseks maandatud.
Allikas - vool voolab selle kaudu äravoolust, kui transistor on avatud
![]()
N-kanal ja P-kanal
![]()
Analoogiliselt bipolaarsete transistoridega erinevad väljatransistorid polaarsuse poolest. N-kanali transistorit kirjeldati eespool. Need on kõige levinumad.
Kui P-kanal on määratud, erineb see noole suunas ja on jällegi "ümberpööratud" käitumisega.
Transistoride ühendamine suure võimsusega komponentide juhtimiseks
Mikrokontrolleri tüüpiline ülesanne on konkreetse vooluahela komponendi sisse- ja väljalülitamine. Mikrokontrolleril endal on tavaliselt tagasihoidlikud võimsuse käsitsemise omadused. Nii et Arduino, 5 V väljundiga kontakti kohta, talub 40 mA voolu. Võimsad mootorid või ülierksad LED-id võivad tõmmata sadu milliampreid. Selliste koormuste otse ühendamisel võib kiip kiiresti ebaõnnestuda. Lisaks on mõne komponendi tööks vaja üle 5 V pinget ja Arduino ei saa digitaalsest väljundviigust toota rohkem kui 5 V.
Kuid piisab lihtsalt transistori juhtimisest, mis omakorda juhib suurt voolu. Oletame, et peame ühendama pika LED-riba, mis vajab 12 V ja tarbib 100 mA:
![]()
Nüüd, kui väljund on seatud loogilisele ühele (kõrge), avab baasi sisenev 5 V transistori ja vool läheb läbi lindi - see helendab. Kui väljund on seatud loogilisele nullile (madal), maandatakse alus läbi mikrokontrolleri ja vooluvool blokeeritakse.
Pöörake tähelepanu voolu piiravale takistile R. See on vajalik selleks, et juhtpinge rakendamisel ei tekiks mikrokontrolleri - transistori - maanduse marsruudil lühist. Peaasi, et mitte ületada Arduino kontakti kaudu lubatud voolu 40 mA, seega peate kasutama takistit, mille väärtus on vähemalt:
Siin Ud- see on transistori enda pingelang. See sõltub materjalist, millest see on valmistatud, ja on tavaliselt 0,3–0,6 V.
Kuid absoluutselt ei ole vaja voolu hoida lubatud piiril. On vaja ainult, et transistori võimendus võimaldaks teil juhtida vajalikku voolu. Meie puhul on see 100 mA. Kasutatava transistori jaoks vastuvõetav h fe= 100, siis piisab meile 1 mA juhtvoolust
Meile sobib takisti väärtusega 118 oomi kuni 4,7 kOhm. Stabiilseks tööks ühel küljel ja väikesel kiibil teisel pool on 2,2 kOhm hea valik.
Kui kasutate bipolaarse transistori asemel väljatransistori, saate ilma takistita hakkama:
![]()
See on tingitud asjaolust, et selliste transistoride väravat juhitakse ainult pingega: mikrokontrolleri - värava - allika sektsioonis pole voolu. Ja tänu oma kõrgetele omadustele võimaldab MOSFET-e kasutav vooluahel juhtida väga võimsaid komponente.





